Vigilante ?
October 02 / 10 / 2015
Quite a few vigilante's on comic's, movies and games have a grappling gun to shoot on a nearby building to either escape or get the high ground. I suppose the most famous ones might be Batman or possibly Rorschach from Watchmen, or Ada Wong from Resident Evil. The military have already got something that fires over 100 feet but does not hoist the user and is not a single hand held device. I must set myself some parameters to which I will design a gun to, these are;
My weight - 60kg + 10kg for allowances
The height - 10m
The time - 5 seconds or better.
Must be a single hand-held device
I think that all about covers it. So I first must work out the energy required to do such a thing by using the formulae of gravitational potential energy which is as follows;
Energy = mass x gravity x height.
Energy = 70kg x 9.81m/s x 10m
Energy = 6.9kJ
I will round it up to 10kJ to be on the safe side, so what source could provide that kind of power. I must note that I will require a source of 2kW for five seconds. I have done quite a lot of research and my first idea was going to be CO2, but unfortunately as the CO2 source discharges it causes it to cool dropping it's pressure from 800psi down to around 200psi making performance poor, I would need a huge motor to make up for the drop in pressure. I found the only way would be to use electricity, so first of all the supply. The only batteries suitable are lithium polymer which can discharge huge amounts of current and are not too badly priced. I have also found a suitable motor pack that comes with a controller, it's 44000rpm at 2600W. I have also found a battery to go with it and it hold's 22000J. All of this combined is a total price of £160, I have the line so the only other extra cost is the gears and bearings.
I have bought some braided fishing line that is rated at a capacity of 100kg, 0.73mm in diameter. If I'm going to be using a length of 10m then it's volume will be( (0.073 / 2) ^ 2) x pi x 1000 = 4.18cm ^ 2. The bigger the spool that I place the line on, the least it's diameter will change, however if I gear the motor so that it's maximum rating is at the widest diameter then it will work similar to a variable velocity transmission. If I imagine the outside diameter to be 50mm and the spool to be 15mm wide then I can work it out by;((9((((5 / 2) ^ 2) x pi x 1.5) - 4.18cm ^2) / 1.5) / pi ) sqrt ) x 2 = 46.3mm, or if the spool width was to be 10mm wide then the minimum diameter would be 44.3mm or 5mm it would be 37.9mm. The thinner the spool, the wider the acceleration and the higher the chance the line will wind on the spool properly, although the line could wedge between the rest of the line on the spool. Vice versa with a wider spool. I will simply have to test a few different ones and then decide which one turns out the best.
Now I need to know the gearing ratio. If the maximum diameter of the spool is going to be 50mm then this distance covered is 50 x pi = 157mm. If I'm to cover 2 metres per second, then 2000 / 157 is 12.7 rps or 762rpm. 44400 rpm / 762rpm = 58.27 the gearing ratio, I will round it to 58.
October 06 / 10 / 2015
Over the past few days I have been searching around to see if I can find a better solution to my gearing problem, I did manage to find lower rpm motors but at higher working voltages. I have found a motor rated at 3000W, 130KV and requiring 10 LiPo's. If I go for my goal of 2000W which would be around 7 LiPo's then 3.7V x 7 = 25.9V, multiplied by the KV of 130, 25.9 x 130 = 3367rpm, then divide it by 762 to get gear ratio, 3367 / 762 = 4.4. With a 14 and 60 tooth gear I would be very close to this ratio. With an extra 1000W at my disposal it should make the gun as realistic as the movies, if efficiencies were nothing to consider then it would only take me 2.3 seconds to scale 10 metres.
October 08 / 10 / 2015
I have finally bought the motor that I needed along with an ESC and a battery pack capable of 66kJ. I have also bought some steel spur gears that will reduce the gear ratio in two steps, 2.2:1 and 2:1 leaving the final rpm to be 762.
October 13 / 10 / 2015
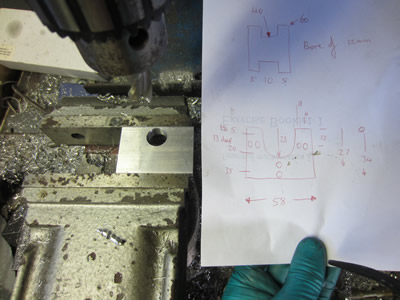
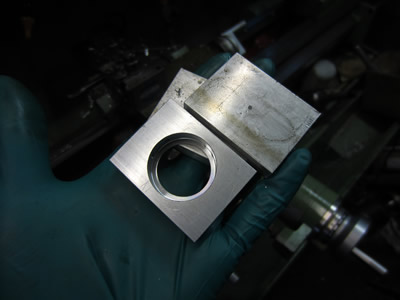
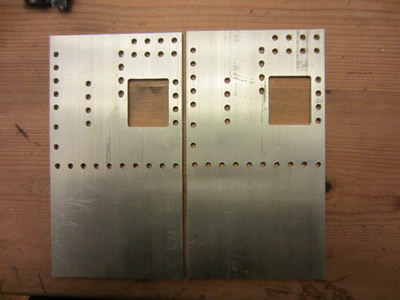
I feel like I'm waiting forever for the parts to come, I was waiting to get them before designing the gun itself but I'm getting a little impatient. The design is a little rough because I'm unsure how accurate the dimensions are for the motor, batteries and ESC. It has however given me the chance to design the gearbox and how to set the bearings in blocks. Along with this I have bought the bearings and some aluminium to put together a chassis, I'm hoping that 3mm thick should be stable enough. The gun will look a little box-like and I'm not sure If I will be able to get around it without making the gun any bigger than it already is. Maybe if I drill a couple of holes through the chassis to make it look more skeleton, it will reduce the weight and hopefully make it look a little more interesting.
The gun part or "launcher" was thought up before I had even begun to think about the hoist part. I live in the uk and to fire a projectile from a barrel with any more than 16J is breaking the law which would mean a very light grapple. There are only two ways around this, a crossbow or a self-propelled device similar to a rocket. If the grapple itself was to be like a crossbow bolt, hollow with fins for stabilisation then I could shove this onto a launch system. The bolt would have sufficient weight to be stable at a distance of 10m aided with fins to keep it in the right direction.
Now as for the grapple itself, it would need some way of hooking onto something. The classic grapple shape is good for most situations but it's not always reliable and cannot penetrate into concrete like in the movies. I will be making three styles of grapples for three different situations; a classic grapple that will deploy the hooks at it's destination, a hook that clamps onto bars and my own method for attaching a grapple to ceilings - I may even patent the idea.
I also decided to measure my braided line to ensure that the spool would be made to the correct dimensions. I measured it's diameter at 0.9mm which is a lot thicker than the 0.73mm as stated, unless this is the diameter under load. It now means that the smallest diameter of the spool is 41.1mm if the width is to be 10mm wide.
October 15 / 10 / 2015
 I received all of my goods through the post today except for one sprocket, the battery chargers and the aluminium for the chassis.
I received all of my goods through the post today except for one sprocket, the battery chargers and the aluminium for the chassis.
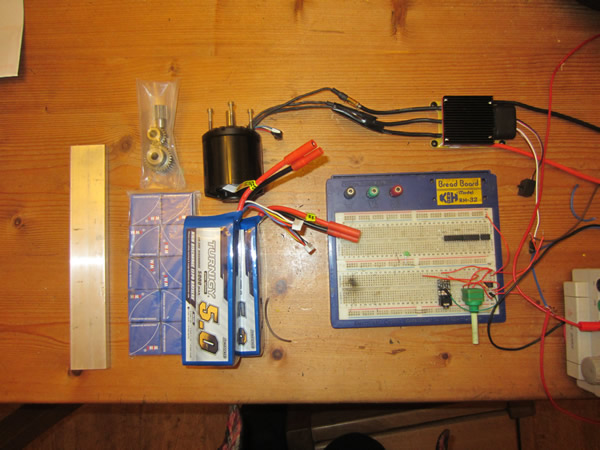
I spent the start of the day playing around with the motor and ESC. The first thing I did was to program a microchip to read the analogue signal from a potentiometer and then output it as a servo signal. I tested it with a servo and it worked perfectly, so I hooked up the motor and ESC.
The acceleration on the motor was a little slow for my liking, so I tried to program it using the potentiometer but the ESC would not go into programming mode. I spent most of the day trawling the internet and even went out to buy a USB programmer but even that wouldn't link with the ESC.
I contacted my supplier to find that they should have supplied a programming USB with the package, only their programmer would work as they had changed the firmware. An equivalent ESC on the market only has a limited number of parameters that can be changed, the author of the software provided has made more options and made these options wider.
October 18 / 10 / 2015
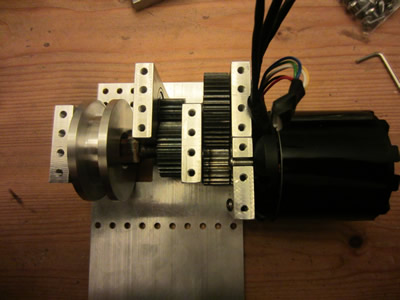
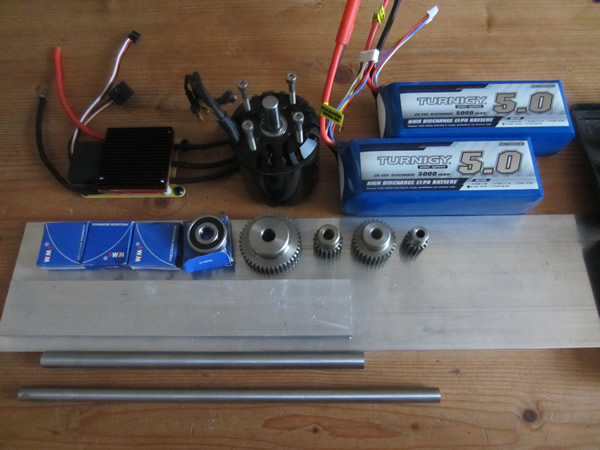 I have finally got everything! well apart from the programmer. Work can now start on the construction.
I have finally got everything! well apart from the programmer. Work can now start on the construction.
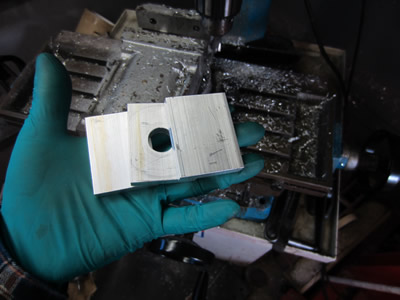
I have also realised that from this picture that the square section of aluminium is not long enough, this is for the bearing carriers. I will not be able to complete the gun without more aluminium.
I set to work with making one of the shafts, it's silver steel ground bar which means I only have to cut it to the correct length.



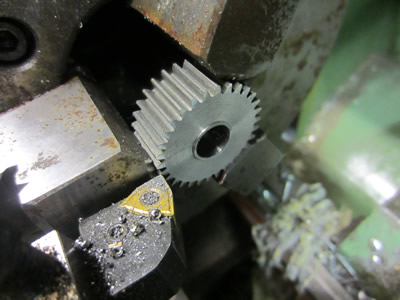
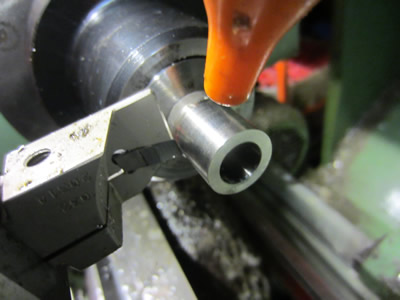
The next part was to shave down and bore out all of the spur gears. I did them all in two operations, the boring out was done in a collet chuck by holding onto the spur gears flange, this was to keep it as concentric as possible. The rest of the height was shaved down by putting the gear back into a three jaw chuck. Below is the 44 tooth gear.



The next few pictures show the 30 tooth gear being machined, I used a reamer to keep the bore exact, the finish doesn't matter at all. A step of 0.5mm was shaved off each side of the gear so that there will be no possibility of them grinding against the bearing housings.


The smallest gear was bored out leaving only a 1mm wall, there is no need for a keyway or grubscrew as it will be welded instead. The only other gear to not have the flanged machined off is the one for the motor as this will need a key shaft, it is also the reason I had to use a 20 tooth gear as a minimum otherwise I could have done the whole thing with two gears.



The shaft was placed through the gears and the 15 tooth and 44 tooth gears were TIG welded together, the bearings were then pressed in place. I highly doubt that the gun will be used enough for the gears to wear, this is the reason for me welding them to the shafts.



October 19 / 10 / 2015
I started out by machining a spool for the line out of aluminium, I have no idea what grade it is but I have never machined aluminium that easy before. There is only one picture as I chose to video me machining it instead, I will be making a couple of video's. I machined another shaft out of silver steel, it is the shaft to hold the reel.
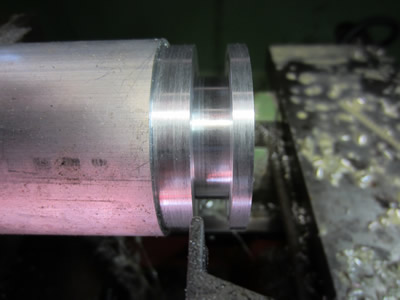


Two steps on both ends were turned so that the bearing would have somewhere to push onto, the 30 tooth gear was welded onto the shaft.



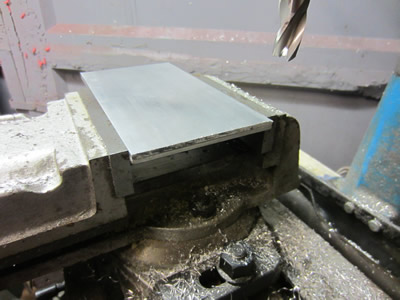
The motor mount was next on the list, the piece was cut, clocked level and the height milled exact.



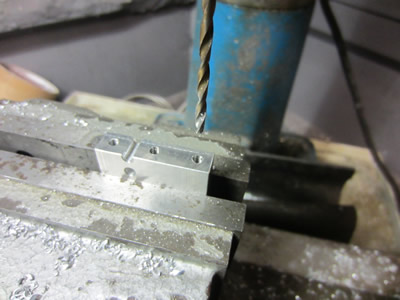
The holes were drilled for the screws to fit the motor.


Using a large ball nose cutter I milled a slot for the spur gear to sit through, holes were drilled and tapped for the chassis securing on the side of the block.



I started work of the bearing blocks to eventually run out of aluminium, I will have to wait before I go any further. I tried to screw the motor to it's mount to find that the holes were spaced too far apart. It turns out that I should have made all of the aluminium parts 52mm wide instead of 58mm wide, luckily I can mill them down, I will just have to elongate some of the hold for the motor to mount to. I really should print out my drawings instead of doing them from memory.



October 24 / 10 / 2015
I've had a couple of sick days but I'm back at the grappling gun. The first part on my list was to mill down the blocks I had done previously, this was done by milling 3mm off both sides. The holes in the sides were then drilled an extra 3mm deeper.


These holes were then tapped again to ensure the bolts would be able to go in deep enough. The holes that were spaced too wide apart were just milled into a single slot.


The next part on the list was to make something for the line reel to key onto. I first started out with some stainless bar, I will be welding it to silver steel. Stainless can be welded to almost any kind of steel, it is just a little more brittle than regular steel but it is very easy to weld due to it's purity. A ring was made by turning the outside diameter, drilling and reaming the bore and then parting it off to a specific height.


The ring was then placed in the miller to machine it to a square, another milling cutter was placed in the bore to stop the whole thing from squashing between the vice jaws.



One of the shafts that I made earlier was placed through this square ring and then TIG welded in place.



The first item to be made was the line spool, so the next thing on the list was to finish it off by milling a square in it's centre. I first placed it in a chuck and then clocked it central in the miller. I milled a square to a specific depth and width to suit the shaft.



A hole was then drilled in the spool to allow the line to be tied off through it. A step was then turned in the bore to allow for some clearance of the shaft key for when the spool is to be disengaged, it will become clear later why the spool has to disengage from it's drive.



October 25 / 10 / 2015
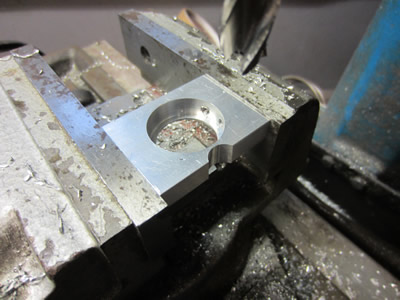
I started the day with boring out the bearing blocks, they have two steps to retain the bearing to the correct height.



The blocks were then lined up in the vice to have holes drilled into them.



The holes were then tapped, this was quite a laborious process.


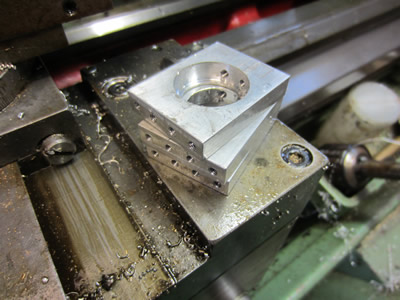
Two of the blocks required a recess to be milled into the side of them, it is for clearance with the drive shafts. The last picture shows how nicely it is all coming along.

October 26 / 10 / 2015
I received the rest of my aluminium through the post so I proceeded with making the last bearing housing plus some spacers. It's quite surprising how long this process actually takes, especially the threading.


The last bearing was pushed into it's housing utilising the vice, it's not the ideal way but there's not much pressure so it was ok.


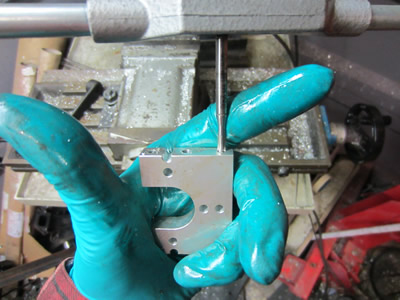
Now that all of the bearing blocks are complete I started with the chassis. I cut some sheets of aluminium with the hacksaw and then milled them to the correct heights.

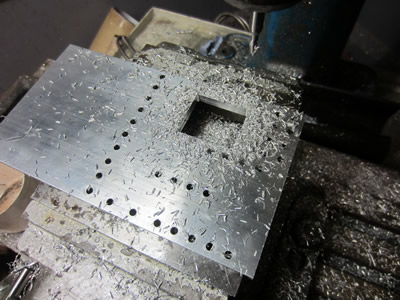
The holes to secure the bearing blocks were drilled and a square was cut out for the line reel to protrude from.

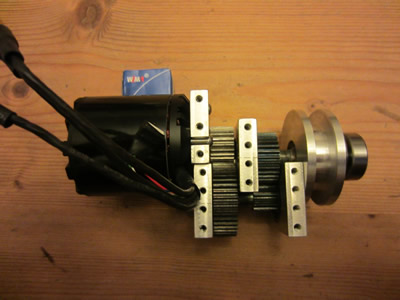
I almost forgot about the gear being keyed onto the motors shaft, I made the decision to weld it as the motor and gears won't get enough use to get replaced. I placed the whole lot in a cup of water to stop damage to the motor and it's bearing. I assembled it all to ensure that it all turns freely and even powered up the motor, it worked perfectly.


Hello, if you have enjoyed reading this project, have taken an interest in another or want me to progress one further then please consider donating or even sponsoring a small amount every month, for more information on why you may like to help me out then follow the sponsor link to the left. Otherwise you can donate any amount with the link below, thank you!